 Sparse beats Dense Supervision
Sparse beats Dense SupervisionAbstract
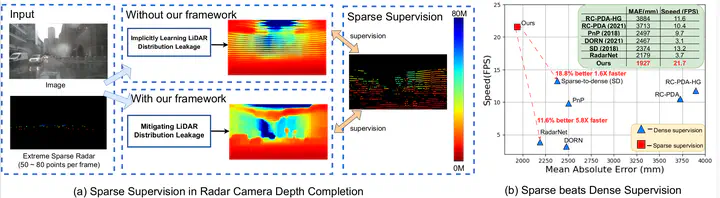
It is widely believed that sparse supervision is worse than dense supervision in the field of depth completion, but the underlying reasons for this are rarely discussed. To this end, we revisit the task of radar-camera depth completion and present a new method with sparse LiDAR supervision to outperform previous dense LiDAR supervision methods in both accuracy and speed. Specifically, when trained by sparse LiDAR supervision, depth completion models usually output depth maps containing significant stripe-like artifacts. We find that such a phenomenon is caused by the implicitly learned positional distribution pattern from sparse LiDAR supervision, termed as LiDAR Distribution Leakage (LDL) in this paper. Based on such understanding, we present a novel Disruption-Compensation radar-camera depth completion framework to address this issue. The Disruption part aims to deliberately disrupt the learning of LiDAR distribution from sparse supervision, while the Compensation part aims to leverage 3D spatial and 2D semantic information to compensate for the information loss of previous disruptions. Extensive experimental results demonstrate that by reducing the impact of LDL, our framework with sparse supervision outperforms the state-of-the-art dense supervision methods with 11.6% improvement in Mean Absolute Error (MAE) and 1.6x speedup in Frame Per Second (FPS).